Automatic path planning for dual-crane lifting in complex environments using a prioritized multiobjective PGA
Abstract
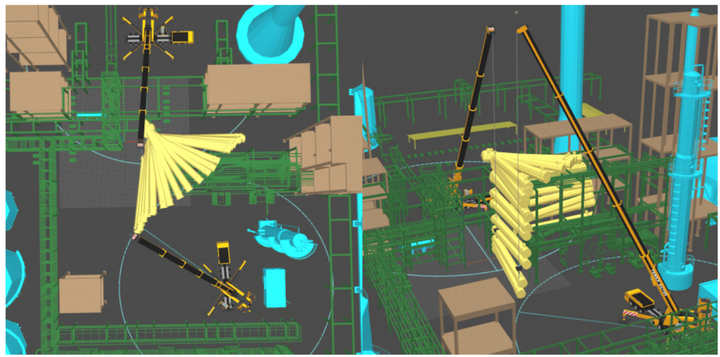
Cooperative dual-crane lifting is an challenging and critical task in industrial sites. In this paper, we aim to automatically generate optimized dual-crane lifting paths under highly complex constraints, i.e., collision avoidance, coordination between the two cranes, and balance of the lifting target. We propose a mathematical modeling of the cooperative lifting system. Based on the formulation, we devleop a massively parallel solver based on a multi-objective Genetic Algorithm to compute highly-optimized lifting trajectories that satisfy continous collision-avoidance, coordination, and load-balancing constraints in complex industrial envirnoments. Our results show that the planner generate lifting paths that are safe, efficient, and easy for conduction for any complex environments.