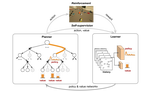
Closing the Planning-Learning Loop with Application to Autonomous Driving
Real-time planning under uncertainty is critical for robots operating in complex dynamic environments. Consider, for example, an …
LEADER: Learning Attention over Driving Behaviors for Planning under Uncertainty
Uncertainty on human behaviors poses a significant challenge to autonomous driving in crowded urban environments. The partially …

GAMMA: A General Agent Motion Model for Autonomous Driving
This paper presents GAMMA, a general motion prediction model that enables large-scale real-time simulation and planning for autonomous …
MAGIC: Learning Macro-Actions for Online POMDP Planning using Generator-Critic
When robots operate in the real world, they need to handle uncertainties in sensing, acting, and the environment dynamics. Many tasks …

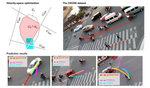
SUMMIT: A Simulator for Urban Driving in Massive Mixed Traffic
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, …

LeTS-Drive: Driving in a Crowd by Learning from Tree Search
Autonomous driving in a crowded environment, e.g., a busy traffic intersection, is an unsolved challenge for robotics. The robot …

Context and Intention Aware Planning for Urban Driving
We present a novel autonomous driving system which uses the road contextual information and intentions of other road users for urban …
HyP-DESPOT: A hybrid parallel algorithm for online planning under uncertainty
Planning under uncertainty is critical for robust robot performance in uncertain, dynamic environments, but it incurs high …

PORCA: Modeling and planning for autonomous driving among many pedestrians
This paper presents a planning system for autonomous driving among many pedestrians. A key ingredient of our approach is PORCA, a …

Automatic path planning for dual-crane lifting in complex environments using a prioritized multiobjective PGA
Cooperative dual-crane lifting is an challenging and critical task in industrial sites. In this paper, we aim to automatically generate …

Parallel genetic algorithm based automatic path planning for crane lifting in complex environments
Heavy lifting is a common and important task in industrial plants. It is conducted frequently during the time of plant construction, …
