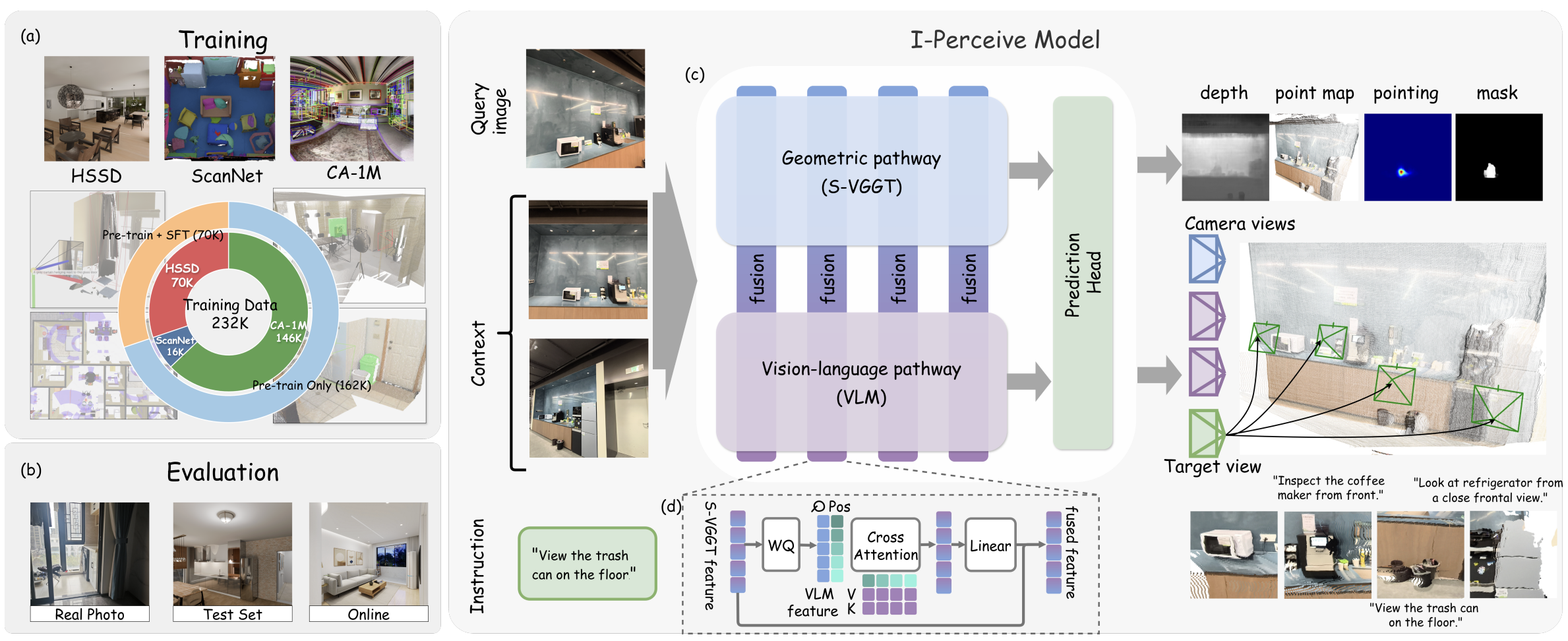
I-Perceive: A Foundation Model for Vision-Language Active Perception
Yongxi Huang, Zhuohang Wang, Wenjing Tang, Cewu Lu, Panpan Cai
arXiv preprint · 2026
I am a roboticist. I am currently a Full-time Faculty at the Shanghai Innovation Institute, and an Associate Professor at the School of Artificial Intelligence, Shanghai Jiao Tong University. Prior to that, I was a postdoctoral research fellow with Prof. David Hsu at the Department of Computer Science, National University of Singapore. I received my PhD from Nanyang Technological University.
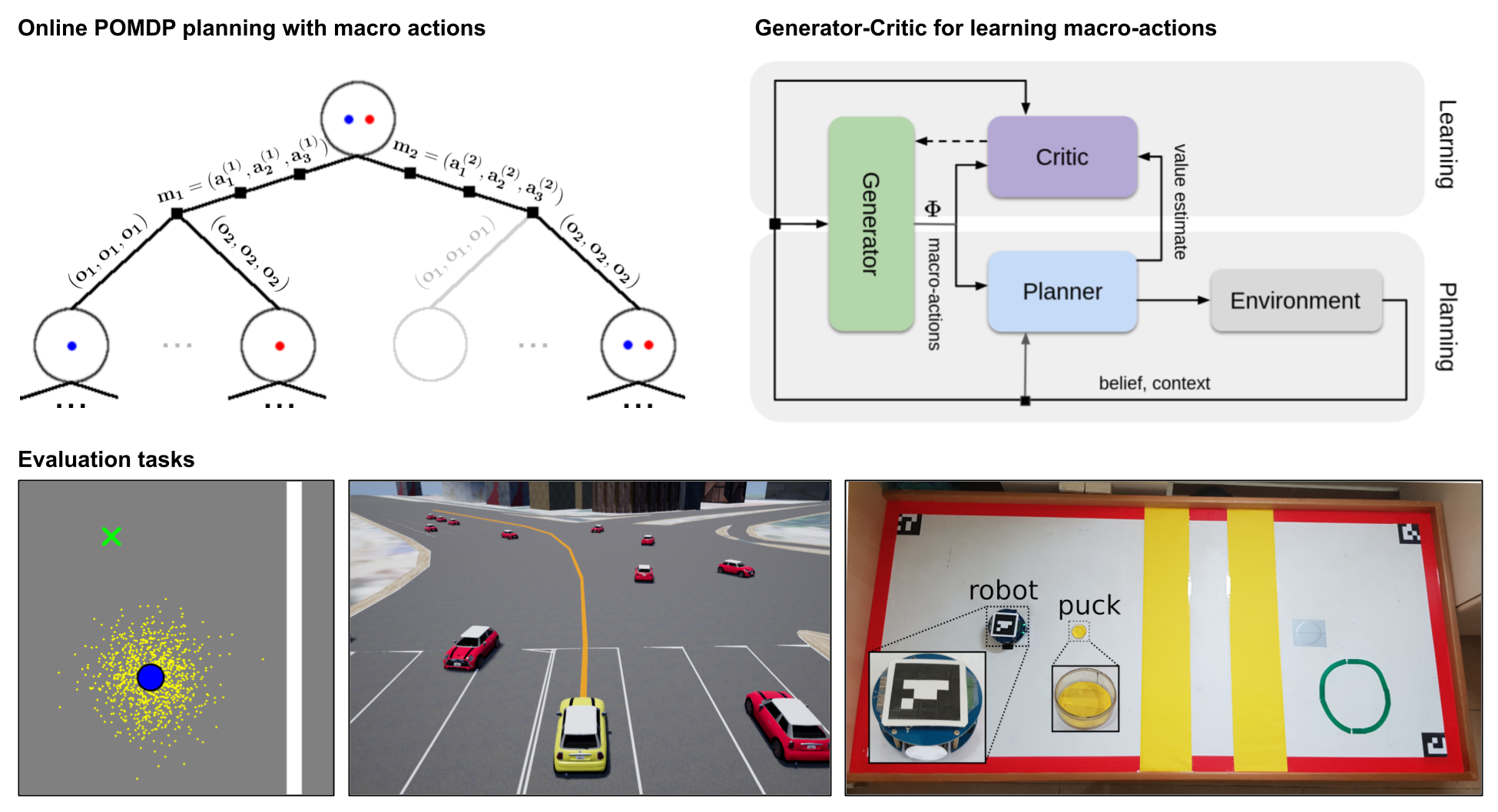
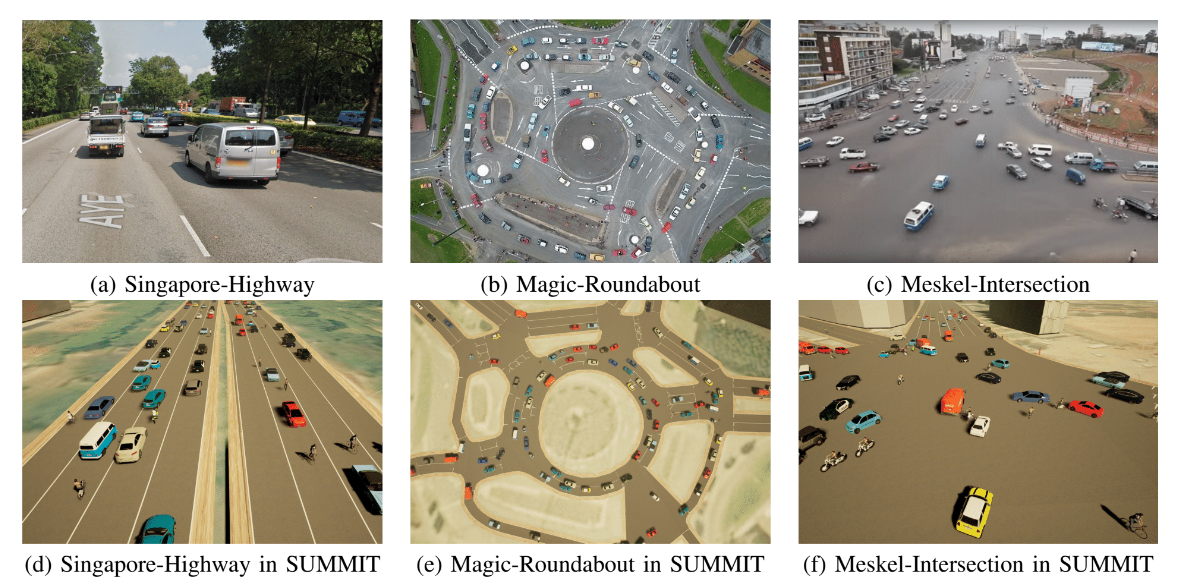
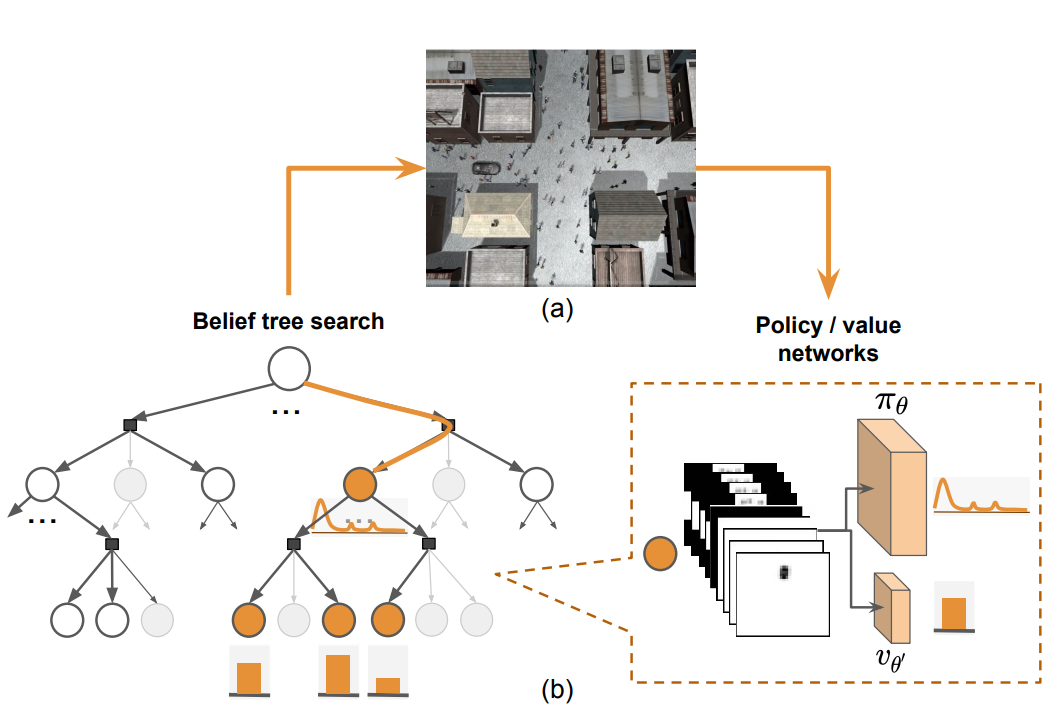
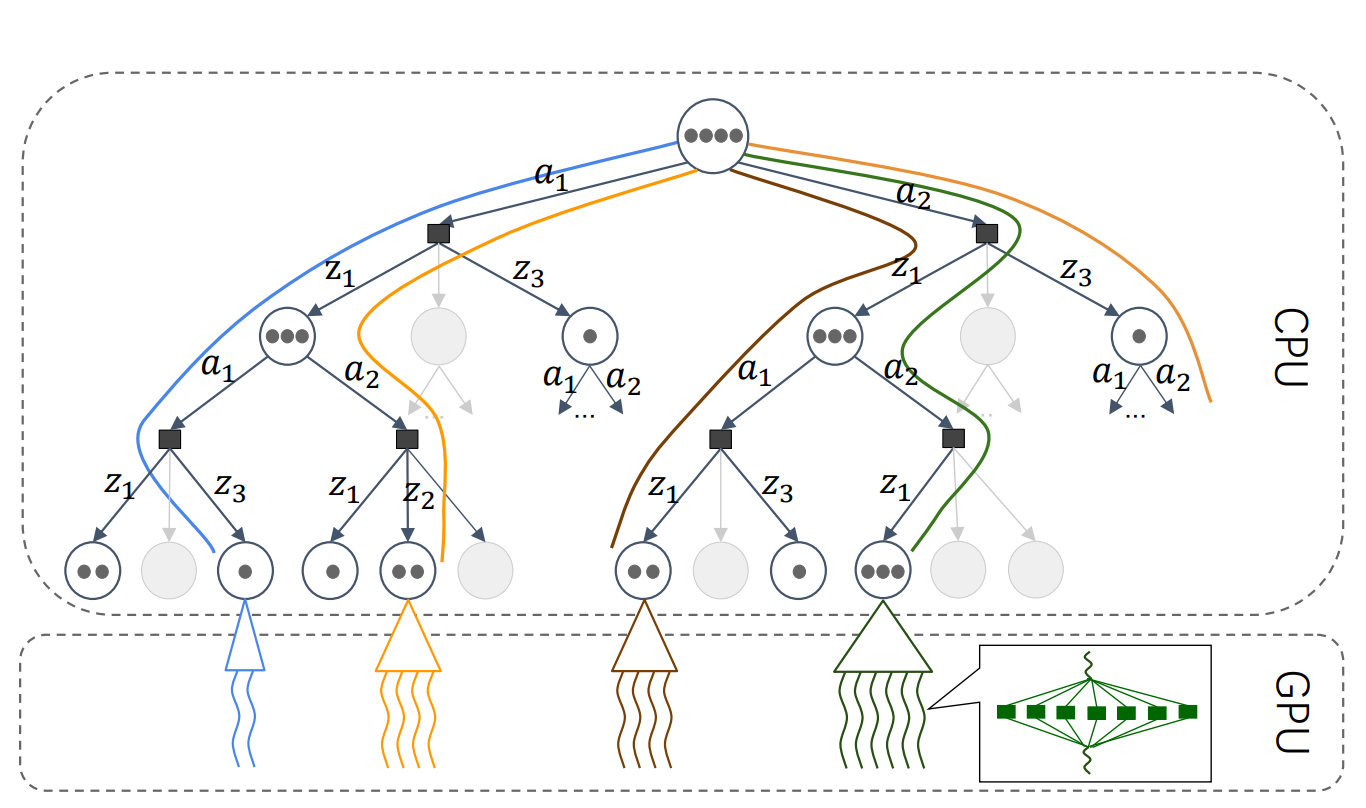
I work on large-scale decision making for robots in open, complex, and dynamic environments — bridging explicit planning with learning and foundation models to enable robots to operate smoothly in complex environments and interact seamlessly with humans. Current topics include foundation models for robot planning, integrating planning and learning, open-world robot planning, mobile manipulation for home-service robots, and autonomous driving.
I serve as an Associate Editor of IEEE Transactions on Robotics (T-RO), and have served as Associate Editor for the IEEE International Conference on Robotics and Automation (ICRA 2023) and the International Symposium on Experimental Robotics (ISER 2023). I am Area Chair of RSS 2026 and Organization Chair of CEAI 2024 in China. My LEADER paper was a Best Paper Award Finalist at CoRL 2022, and my self-designed graduate course on autonomous driving was honored with the SJTU University-Level Outstanding Course Award.
Yongxi Huang, Zhuohang Wang, Wenjing Tang, Cewu Lu, Panpan Cai
arXiv preprint · 2026
Renming Huang, Chendong Zeng, Wenjing Tang, Jintian Cai, Cewu Lu, Panpan Cai
Robotics: Science and Systems (RSS) · 2026
Zhihong Liu, Yang Li, Rengming Huang, Cewu Lu, Panpan Cai
arXiv preprint · 2026
Xuanjin Jin, Yanxin Dong, Bin Sun, Huan Xu, Zhihui Hao, XianPeng Lang, Panpan Cai
Robotics: Science and Systems (RSS) · 2026
Haoming Ye, Yunxiao Xiao, Cewu Lu, Panpan Cai
arXiv preprint · 2026
Wenjing Tang, Xinyu He, Yongxi Huang, Yunxiao Xiao, Cewu Lu, Panpan Cai
Advances in Neural Information Processing Systems (NeurIPS) · 2025
Haoming Ye, Yunxiao Xiao, Cewu Lu, Panpan Cai
Advances in Neural Information Processing Systems (NeurIPS) · 2025
Xuanjin Jin, Chendong Zeng, Shengfa Zhu, Chunxiao Liu, Panpan Cai
IEEE Robotics and Automation Letters (RA-L) · 2025
Panpan Cai, David Hsu
IEEE Transactions on Robotics (T-RO) · 2023
Mohamad H. Danesh*, Panpan Cai* (corresponding author), David Hsu
Conference on Robot Learning (CoRL) (Best Paper Finalist) · 2022
Yuanfu Luo*, Panpan Cai* (co-first and corresponding author), Yiyuan Lee, David Hsu
IEEE Robotics and Automation Letters (RA-L) · 2022
Yiyuan Lee, Panpan Cai, David Hsu
Robotics: Science and Systems (RSS) · 2021
Panpan Cai*, Yiyuan Lee* (co-first author), Yuanfu Luo, David Hsu
IEEE International Conference on Robotics and Automation (ICRA) · 2020
Panpan Cai, Yuanfu Luo, Aseem Saxena, David Hsu, Wee Sun Lee
Robotics: Science and Systems (RSS) · 2019
Panpan Cai, Yuanfu Luo, David Hsu, Wee Sun Lee
Robotics: Science and Systems (RSS), 2018; extended version in International Journal of Robotics Research (IJRR), 2021
Full-time Faculty
Shanghai Innovation Institute · Shanghai, China
Associate Professor
School of Artificial Intelligence, Shanghai Jiao Tong University · Shanghai, China
Associate Professor
Qing Yuan Research Institute, Shanghai Jiao Tong University · Shanghai, China
Senior Research Fellow
National University of Singapore · Singapore
Research Fellow
National University of Singapore · Singapore
Doctor of Philosophy
Nanyang Technological University · Singapore
BSc, Computational Mathematics