Abstract
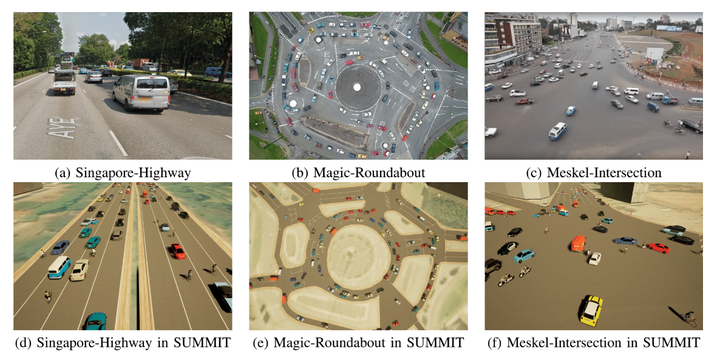
Autonomous driving in an unregulated urban crowd is an outstanding challenge, especially, in the presence of many aggressive, high-speed traffic participants. This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. By leveraging the open-source OpenStreetMap map database and a heterogeneous multi-agent motion prediction model developed in our earlier work, SUMMIT simulates dense, unregulated urban traffic for heterogeneous agents at any worldwide loca- tions that OpenStreetMap supports. SUMMIT is built as an extension of CARLA and inherits from it the physical and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control and planning, end-to-end learning. We provide a context-aware planner together with benchmark scenarios and show that SUMMIT generates complex, realistic traffic behaviors in challenging crowd-driving settings.