Parallel genetic algorithm based automatic path planning for crane lifting in complex environments
Abstract
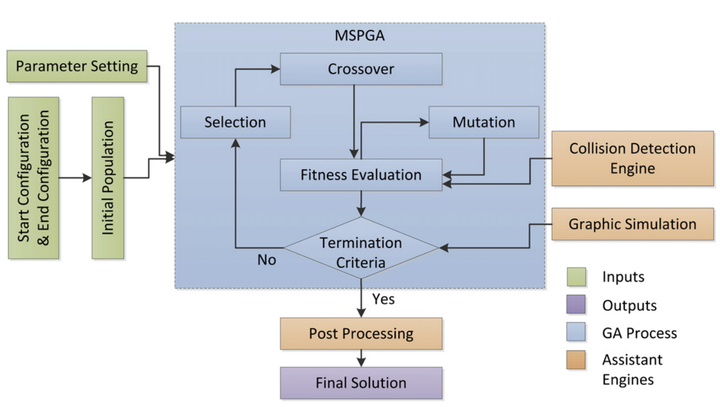
Heavy lifting is a common and important task in industrial plants. It is conducted frequently during the time of plant construction, maintenance shutdown and new equipment installation. To find a safe and cost effective way of lifting, a team works for weeks or even months doing site investigation, planning and evaluations. This paper considers the lifting path planning problem for terrain cranes in complex environments. The lifting path planning problem takes inputs such as the plant environment, crane mechanical data, crane position, start and end lifting configurations to generate the optimal lifting path by evaluating costs and safety risks. We formulate the crane lifting path planning as a multi-objective nonlinear integer optimization problem with implicit constraints. It aims to optimize the energy cost, time cost and human operation conformity of the lifting path under constraints of collision avoidance and operational limitations. To solve the optimization problem, we design a Master–Slave Parallel Genetic Algorithm and implement the algorithm on Graphics Processing Units using CUDA programming. In order to handle complex plants, we propose a collision detection strategy using hybrid configuration spaces based on an image-based collision detection algorithm. The results show that the method can efficiently generate high quality lifting paths in complex environments